Nos compétences
à votre service
Bureau d'étude
Votre partenaire du « Modèle au Mulet »
Kintesys propose ses technologies et son savoir-faire au service de vos projets. Nous intervenons avec un ensemble homogène d’outils et de compétences, de l’étude préliminaire jusqu’à la mise au point de votre groupe motopropulseur. Kintesys réalise aussi l’implantation des GMP dans un démonstrateur tel qu’une « démo car ».
Simulation
Développement d’algorithmes
Prototypage
Développement électronique
Bancs de tests
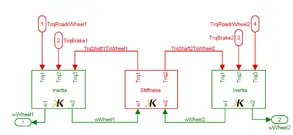
Des modèles pour simuler, concevoir, tester et comprendre
Nous concevons, paramétrons et validons nos propres modèles, en général basés sur des lois physiques. Ces modèles sont utilisés en interne pour la simulation, la conception des lois de commandes, le test HIL et pour aider à la compréhension des phénomènes.
Ils sont multidisciplinaires : mécanique, hydraulique, pneumatique, électrique… Le degré de complexité du modèle est adapté en fonction de l’utilisation finale. Ces modèles peuvent aussi constituer l’objet même d’une étude, le client étant alors l’utilisateur du modèle développé à sa demande.
Quelques exemples de modèles :
- Modèle de franchissement/dynamique véhicule
- Batterie, machine électrique
- Réseau de bord (12V 48 V 400 V)
- Moteur essence et Diesel (du point de vue couple, polluants…)
- Boîte de vitesses (efforts entre crabots, vitesse relative d’engagement)
- Chaîne de traction (modes, jeux…)
L'intelligence du système
Nous concevons, testons et mettons au point des algorithmes de pilotage (ou lois de commande) adaptés au besoin, c’est-à-dire avec le juste niveau de sophistication dans le but d’être performant, fiable, robuste, facile à mettre au point et à maintenir.
Nous pouvons avoir recours à des solutions simples (à base de PID, cartographies…) mais aussi à des solutions basées sur des techniques d’automatique avancées (observateur, placement de pôles robuste, optimisation sous contrainte, logique floue…).
Quelle que soit la solution, elle sera transférée au client avec une formation et une documentation complète qui lui permettra la plus grande autonomie.
Quelques exemples de lois de commande :
- Optimisation de la gestion énergétique
- Algorithme de gestion de la suralimentation
- Torque vectoring
- Agrément de conduite
- Optimisation de la traction / franchissement

Mettre le calculateur en situation réelle
Nous disposons en interne d’un simulateur temps réel qui permet de faire « croire » aux calculateurs utilisés qu’ils pilotent le système réel (principe du test Hardware In the Loop).
Ce simulateur est alimenté par nos modèles et est connecté à nos outils de dépouillement.
Nous utilisons ce simulateur interne essentiellement dans le cadre de nos travaux de prototypage rapide.
Ceci garantit une exceptionnelle fiabilité des solutions matérielles et logicielles livrées.
Il nous est également possible de tester à la demande le calculateur et les algorithmes d’un client.
Nous avons de plus une grande expérience dans la mise en oeuvre de banc HIL chez nos clients, aussi bien sur les aspects modèles que sur les aspects exploitations (interface homme/machine, scenarii de tests…).

Le plus court chemin de l'idée à la validation
Notre méthode de prototypage rapide des algorithmes a la particularité d’être rapide non seulement en développement mais aussi en validation et en mise au point. Ces plateformes disposent d’un enregistreur de données intégré et bénéficient :
- d’un environnement graphique de développement
- d’une méthode de conception modulaire
- d’une génération automatique de code
- d’un calculateur virtuel
- d’outils de paramétrage et de dépouillement
- d’un suivi de version (logiciel et paramètres)
Pour gagner encore en efficacité et diminuer encore le délai de mise en œuvre, nous disposons de bibliothèques de fonctions dans de multiples domaines.
Exemples de réalisations :
- véhicules hybrides 48 et 400 V
- chaine de propulsion navale hybride ou électrique
- pilotage moteur essence et Diesel
- gestion de la suralimentation
- véhicules électriques 2 et 4 RM

Des outils, du sens physique, de la méthode et de l'expérience
Activités transverses importantes, l’analyse et le dépouillement de données interviennent pour le paramétrage des modèles, le dépouillement des simulations et des essais, les tests HIL….
L’analyse et le dépouillement de données sont parfois l’objet d’un projet à part entière lorsqu’il s’agit de faire du « reverse engineering ».
Nous nous appuyons sur :
- Un outil de dépouillement graphique : ATLAS (®McLaren Applied). Issu de la compétition, ATLAS est ouvert, convivial et performant.
- Des outils plus conventionnels : Matlab (®The MathWorks), Excel (®Microsoft).
Afin d’avoir une efficacité maximale, nos outils sont interconnectés et nous avons automatisé les procédures de dépouillement et d’analyse les plus fréquemment utilisées.

Des développements électroniques pour s'adapter à tous les besoins
Nous travaillons sur un grand nombre de systèmes différents dont les particularités nous conduisent à créer des interfaces électroniques particulières. Pour concevoir ces modules, nous disposons des moyens et du savoir-faire en :
- Electronique analogique et numérique
- Electronique de puissance
- Logiciel bas niveau
Les prototypes sont réalisés par nos soins, puis le schéma validé est confié à un partenaire pour réalisation industrielle. Nous prenons ensuite en charge la réalisation du câblage.
Quelques exemples :
- Calculateur chaîne de traction électrique
- Interface de capteurs ou actionneurs
- Driver d’injection
- Boîtier de test et simulation
- Battery Management System
Nous commercialisons certaines de ces réalisations comme des produits à part entière.

Nos technologies pour valoriser vos innovations
Kintesys possède des méthodologies et des technologies qui lui permettent de réaliser une étude allant jusqu’à la réalisation d’un démonstrateur.
Pour cela, nous allions notre contrôle-commande et vos innovations sur un groupe motopropulseur.
Notre pluridisciplinarité et l’éventail de nos compétences nous permet de vous accompagner pour tout type de projet de démonstrateur. Notre champ d’action peut aller de la spécification du besoin jusqu’à la réalisation complète et la mise au point du prototype.

La dernière touche du 'clef en main'
Nous finalisons nos études par la mise au point et la validation en intervenant sur banc ou sur véhicule. Nous appliquons des méthodologies et des outils spécifiques pour minimiser les tests et accélérer les dépouillements.
Avant la validation :
Nos lois de commandes sont préalablement testées sur calculateurs virtuels (simulation de stratégies et modélisation physique du système contrôlé).
Ensuite, nous simulons sur HIL (Hardware in the loop) avec la présence du calculateur réel. Notre expertise multi-domaines nous permet d’être très autonomes pour la conduite et la réalisation d’essais. Il nous est également possible de gérer l’instrumentation du système, la réalisation d’un faisceau…
Enfin, notre banc GMP 4RM permet une intégration totale des équipes développement et mise au point, gage de qualité et de réactivité
Dernière étape avant le transfert de l’étude, la mise au point est aussi l’occasion de former le client aux solutions adoptées.
Exemples de mise au point : agrément, optimisation énergétique, gestion suralimentation, contrôle de traction

Banc d'essai
Nouveauté 2022 : Notre banc GMP devient 4 roues motrices
En complément du banc 250 kW existant, 2 nouveaux pods entièrement conçus par Kintesys permettent de passer la puissance totale à 600 kW.
Un système de stockage d’énergie innovant intégrant des batteries limite la consommation électrique.
Conçu pour répondre à vos besoins en mise au point, c’est aussi la vitrine de notre savoir faire en pilotage GMP électriques et en gestion projets complexes.
Ce projet a été financé par le Gouvernement dans le cadre du plan de Relance.

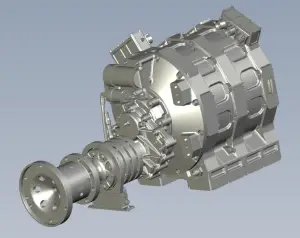
Banc moyeu haute dynamique à 4 pods indépendants
Performances :
- Un essieu de 250 kW / 3000 Nm
- Un essieu de 450 kW / 4000 Nm: Pods 100% Kintesys
- 4 machines pilotables indépendamment dans les 4 quadrants
Autres caractéristiques :
- Faible inertie
- couple mètre haute précision
- Baie de mesure
- Baie de simulation des signaux
- Communication CAN en temps réel avec le véhicule testé
- Refroidissement véhicule par air forcé (calandre, pontons)
- Gestion « micro-grid » du banc
- Alimentation de puissance 400, 800 et 48 V

Stratégie de controle en couple des machines 100 % Kintesys
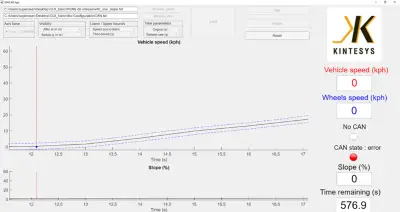
Modes de pilotage :
- Loi de route 2 ou 4 roues motrices
- Couplage avec modèle véhicule
- Guide de conduite avec indicateur de pente
- Simulation virage
- Simulation perte adhérence
- Reproduction de cycles en automatique
- Simulation course
- Pilotage en couple ou en régime
- Régime fixe
Une seule limite : la physique !
Type de véhicule ou système :
- Véhicules prototypes, thermiques, électriques ou hybrides
- Véhicules de compétition dont Formula E
- Machine électrique seule
- GMP de bateau
- VP et VU 2 ou 4 roues motrices
- 2 roues motorisés
Type de mise au point ou essais :
- Hybridation
- Pilotage 4×4
- Caractérisation différentiel
- Optimisation consommation
- Essieu moteur virtuel
- « Reverse Engineering »
Infrastructures
- Deux salles de contrôle
- Groupe froid pour le refroidissement des pods Kintesys
- Ventilation pilotée en calandre et dans les pontons
- Parc de batteries tampon
- Alimentation réversible 800 V

Produits
Tout pour le GMP
Des produits conçus en interne ou par nos partenaires pour vous accompagner de la R&D jusqu’à la mise en série.
Premiers utilisateurs de nos produits, nos ingénieurs sauront vous apporter un support rapide et efficace.
Nous pouvons réaliser des adaptations ou un développement complet à la demande.

Passerelles
Fonction :
Echanger et mettre en forme des informations d’un réseau CAN à un autre réseau.
Le 2ème réseau peut-être du CAN, du wifi, du bluetooth ou du Lin.
Hardware et logiciel Kintesys
Exemples d’applications :
- Implémentation d’un nouvel organe dans une architecture électrique existante
- Leurrage d’un boîtier dans un véhicule prototype
- Ajout d’une IHM, changements d’ID CAN

Driver d'injection et/ou de pompe synchrone
Fonction :
Le driver convertit les impulsions venant de l’ECU en commandes pour solénoïdes.
Hardware et logiciel Kintesys :
- Sorties : peak and hold, courant maxi 30 A
- Tension de boost jusqu’à 100 V
- Communication par CAN
- Pilotage jusqu’à 7 sorties de type solénoïdes
Vilcam
Fonction :
Simulateur de cibles moteur.
Hardware et logiciel Kintesys :
- Sortie : signaux de cibles vilebrequin de type inductif ou effet hall, cibles d’arbres à cames en effet hall
- Réglages utilisateur : régime moteur, déphasage des arbres à cames, simulation d’erreur de cible
Exemples d’applications :
- Test de synchronisation
- HIL

Controleur véhicule 48 V
Fonction :
Pilotage d’une chaîne de traction 48 V
Hardware :
- Tension d’alimentation jusqu’à 60V
- 2 CAN Bus
- Inclut un convertisseur DCDC 48V/12 V 50W
Software :
- Bibliothèque de fonctions et interfaces standards
- Gestion d’une chaine de traction électrique
- Interfaçage batterie et IHM
- Développement à la demande

BMS « 48 V »
Fonction :
Surveillance et gestion batterie jusqu’à 15S
Hardware et logiciel Kintesys
Principales fonctionnalités :
- Mesures tensions cellules et équilibrage
- Calcul SOC, SOH
- Mesure courant et énergie
- Pilotage chargeur
- Pilotage contacteurs
- Sécurités sur-courant, sur / sous tension, température
Possibilité de chaîner les BMS pour obtenir des tensions plus élevées
Disponible pour différentes chimies (Li Ion, Na Ion ..)

Chaîne de traction 48 V
Kintesys développe et distribue des chaînes de traction complètes en 48 V
Machines :
- Issues de la grande série automobile
- Plusieurs gammes de puissance
- Avec ou sans réducteur et différentiel
Contrôleur :
- Notre VCU 48 ou des boîtiers de plus grande sériee
Batterie :
- Standard de différents fournisseurs ou sur mesure
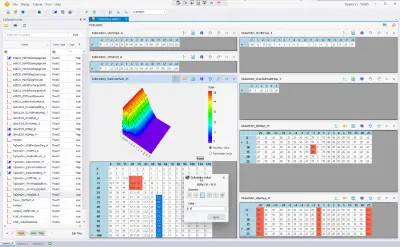
TuneTy
Fonction :
Logiciel de paramètrage et visualisation.
Caractéristiques :
- Protocole CCP
- Paramètrage constantes, tables, cartographies
- Visualisation et enregistrement de variables
- Gestion de jeux de calibration
- Programmation boîtier
Exemples d’applications :
- Mise au point de chaîne de traction.
- R&D ou petite série